“几何误差”又称为运动误差,或者机构误差。坐标测量机由于机构的制造与装配的不完善,不可避免地,其运动部件沿着坐标系中的三条轴线运动时,实际位移会偏离它的名义值。我们从直线运动部件误差和回转运动误差两个方面来对几何误差,也就是俗称的“21项机构误差”进行讨论。
角运动误差
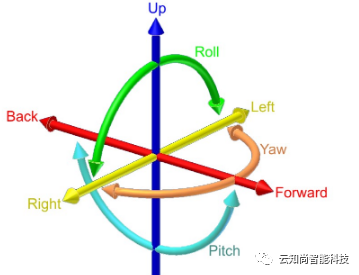
三坐标测量机的运动部件,一般我们都视为刚体。导轨作直线运动时,由于导轨系统并非理想状态,不仅会产生直线度的运动误差,还会产生绕三根轴回转的角运动误差。绕直行运动方向转动的角运动误差,称为滚转误差(Roll);绕与主运动方向垂直的水平轴转动的角运动误差,称为俯仰误差(Pitch);绕与主运动方向垂直的铅锤轴转动的角运动误差,称为偏摆误差(Yaw)。三坐标测量机的每根轴都存在这三种角运动误差,所以合计有9项角运动误差。
角运动误差
对单一的导轨而言,只有直线度误差。但是对于多轴的运动系统来说,除了直线度运动误差(或者称之为平移运动误差),还有角运动误差。导轨加工的直线度误差,重力作用下和其它受力作用下的导轨变形,导轨安装时候的平行度误差,是角运动误差产生的主要因素。
角运动误差只是直行运动位置的函数,而与沿着哪条线测量无关。在实践中,角运动误差常沿测量定位误差和直线度误差的同一条直线测量。角运动误差与直线度运动误差一样,也是由导轨系统的不完善性产生的。一般地说,导轨的直线度误差越大,测量机运动部件的直线度运动误差、角运动误差也都越大。但是,直线度运动误差与角运动误差之间没有一一对应的函数关系,只有相关关系。
21项几何误差
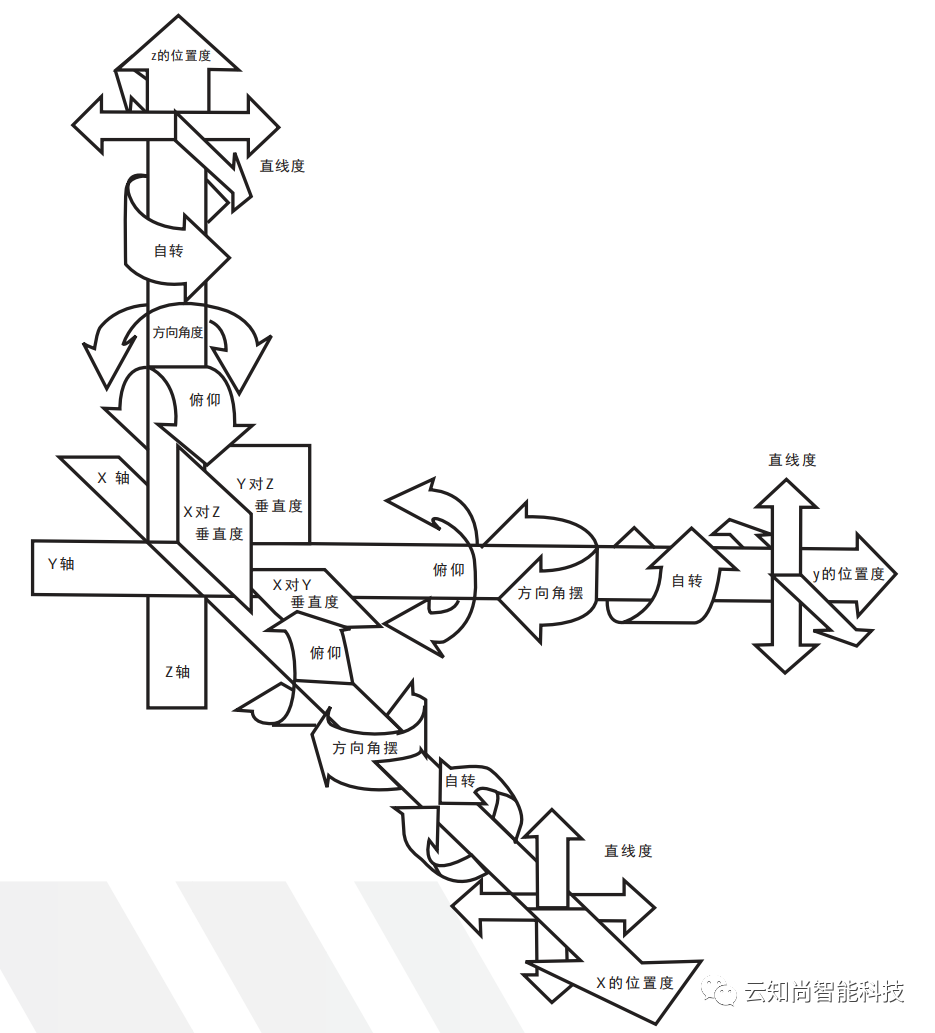
三坐标测量机的每个运动轴有1个定位误差,2个直线度运动误差,3个角运动误差,共6个运动误差,它与一个刚体的6个自由度相对应。三坐标测量机有沿着X,Y,Z方向的三个轴,实现了三维测量,由此也带来了18项运动误差;再加上我们上一篇介绍的三根轴之间的垂直度误差,总共有21项误差。这就是我们常说的21项几何误差,也称为21项机构误差。
21项几何误差
21项几何误差的测量
激光干涉仪不仅精度高,而且量程大,能对定位误差进行连续测量。 所以激光干涉仪在三坐标测量机的几何误差测量与补偿中具有广泛的应用。
双频激光干涉仪采用外差干涉测量原理,测量时使用频差为1~20MHz的双频氦氖激光。当被测目标静止时,其干涉信号为对应频差频率的交流信号;当被测目标移动时,由于多普勒原理,其干涉信号只是在基频载波信号上增加或者减少了Δf,结果依然为交流信号。这个交流信号频率的改变取决于被测目标位置的变化,不受光强和直流电平变化的影响,因此抗干扰能力强,适合在各种环境下开展检测。
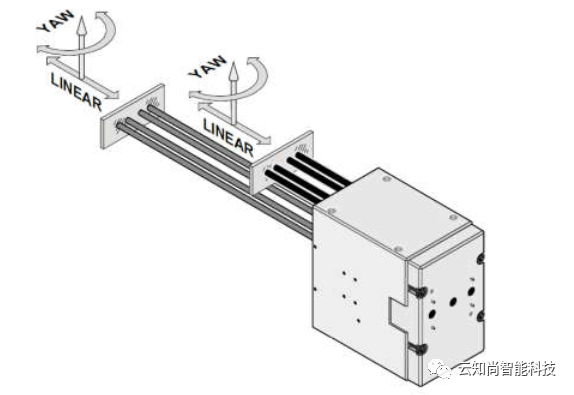
双频激光干涉仪双轴差分干涉镜测量示意
1路位移测量+1路角度测量
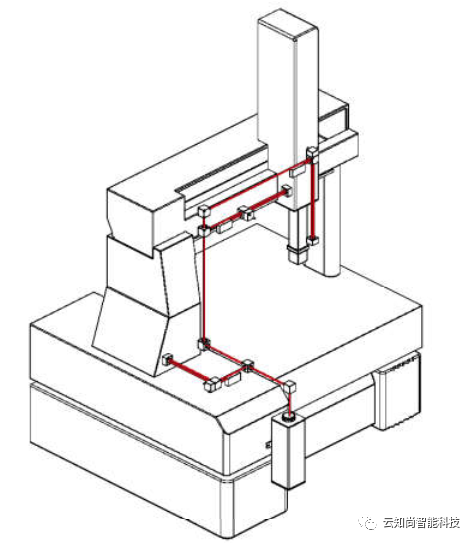
坐标测量机几何误差的测量示意
 扫一扫,关注公众号
扫一扫,关注公众号
工作时间:周一至周五 9:00-18:00
联系人:李经理
手机:13119121219/13609159224
邮件:yunzhisun@yunzhisun.com
地址:西安市西咸新区空港新城临空产业园北区3号楼三层
