“点云” 测量技术广泛应用于测量、测绘、电力、建筑、汽车等相当多的领域。通过激光雷达,结构光扫描仪,线激光扫描仪等设备,可以方便的得到点云数据。点云数据与标准模型的偏差计算,经常使用Polyworks软件中进行。Polyworks软件可以方便的得到全局偏差分布,但是如果需要精确的知道某个局部,或者整体的点云数据上多个点的偏差值,以及这些点的精确坐标,需要工作人员手动一个一个点击设置。当需要成千上万个点的时候,这个工作量就会相当大。云知尚ePath-poly软件,可以帮助用户自设置规则,自动生成测量点,并输出测量报告,显著提高测量效率。
点云是某个坐标系下的点的数据集。点云包含了丰富的信息,包括三维坐标X,Y,Z、颜色、分类值、强度值、时间等等。点云可以表达物体的空间轮廓和具体位置,通过点云我们能看到小到纽扣,茶杯,大到汽车,飞机,甚至是街道、房屋的模型和形状。点云本身和视角无关,可以任意旋转,从不同角度和方向观察一个点云,而且不同的点云只要在同一个坐标系下就可以直接融合。所以点云获取,数据比对,逆向建模,在工业界的应用越来越多。
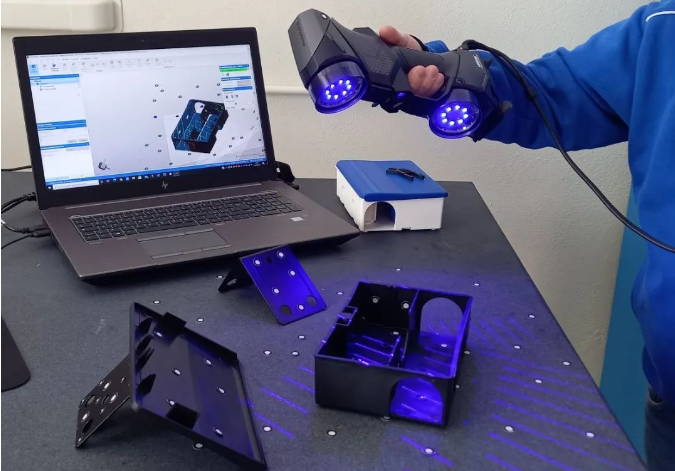
使用CREAFORM形创进行工件扫描 (图片来自CREAFORM形创)
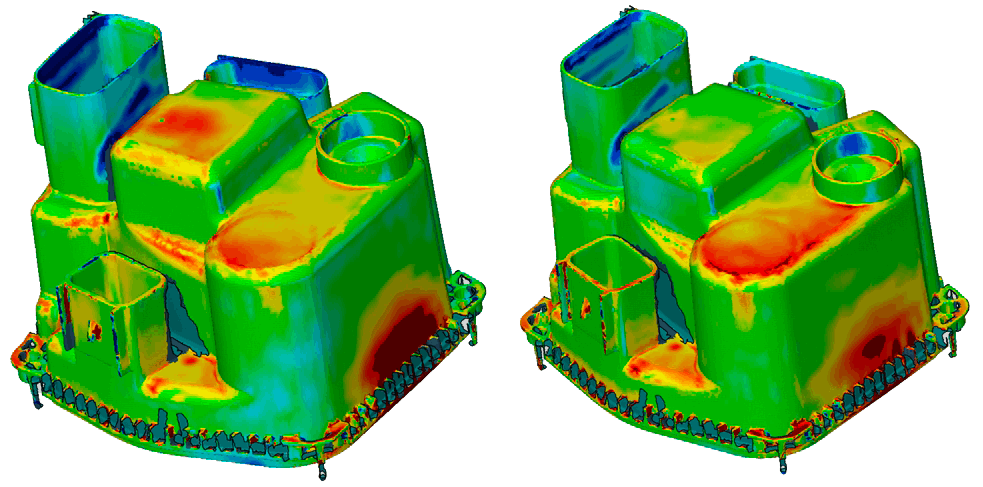
Oechsler公司使用蔡司GOM扫描仪扫描结果(图片来自Oechsler)
用户使用扫描仪厂家的产品获得点云数据后,通常会使用三角化模型来保存扫描结果。同时,很多用户会使用第三方软件Polyworks进行数据后处理。PolyWorks以功能强大且稳定的直接硬件接口而闻名。其旗下产品PolyWorks|Inspector™是一款通用的3D尺寸分析和质量控制软件解决方案, 控制工具或零件尺寸, 判断和避免制造及装配问题, 通过实时测量指导安装,并经由使用便携式测量设备和CNC CMM监督装配产品的质量。它提供一套广泛的指导技术,非常多的工业制造企业相信它能够为便携式测量设备提供高效、精确和可重复的测量流程。
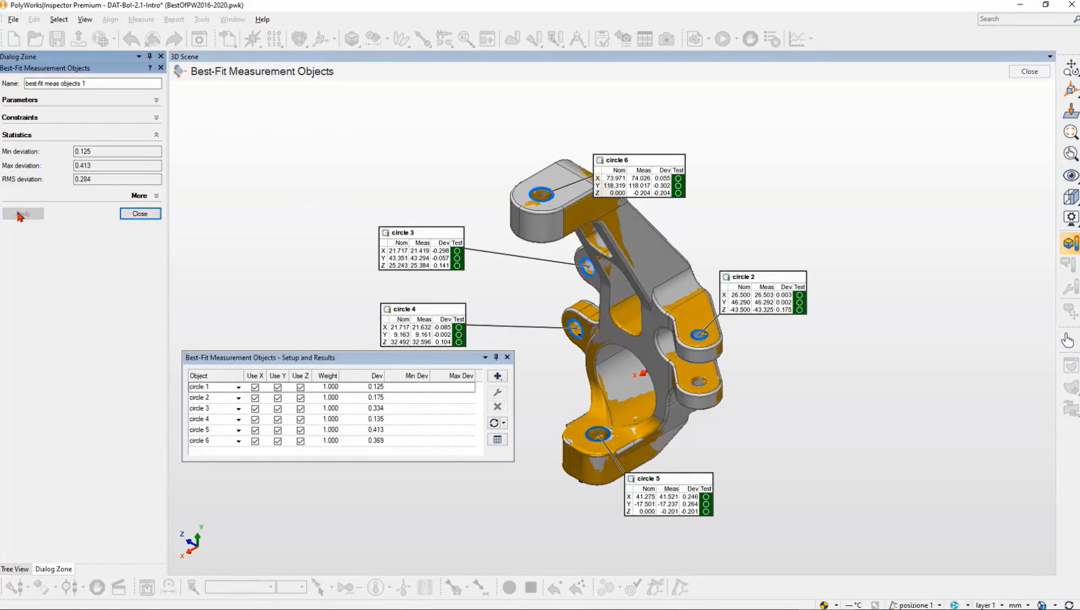
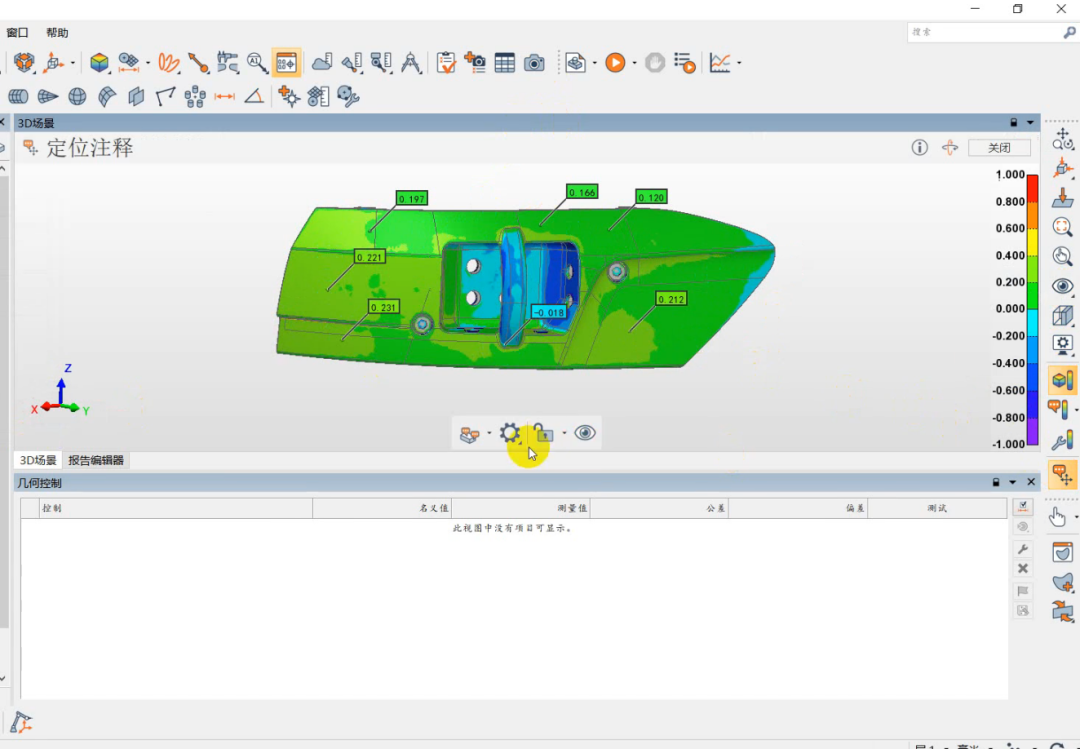
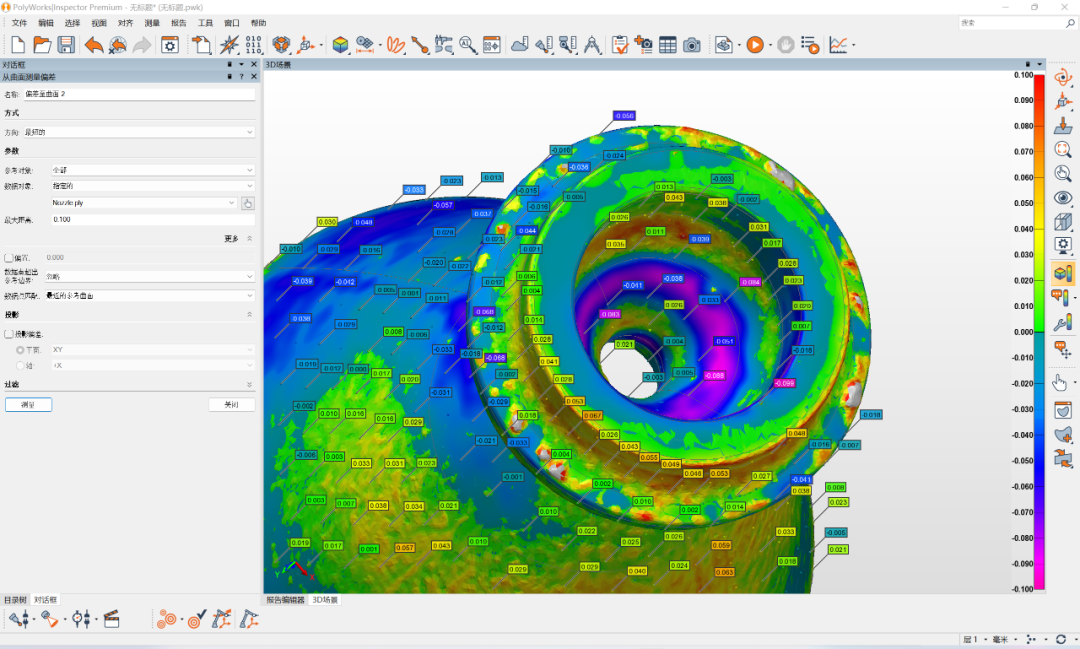
Polyworks测量点输出选取
激光扫描仪扫描获取产品点云信息,导入Polyworks中后与理论数模进行比较,生产偏差分布图,此时能够获取全局的偏差分布,但是无法获取单个目标位置的偏差。单点的偏差需要人工逐点点选才能获取目标点偏差值。在测量点数较多时,人工点选工作量非常大。
客户对于产品测量要求非常高,想知道整个产品上,沿着产品轮廓线分布的一系列测量点的偏差值;或者客户的数模非常大,例如飞机部件,风力发电机叶片,汽车部件等,显然是一个非常费时费工的工作。
云知尚解决方案
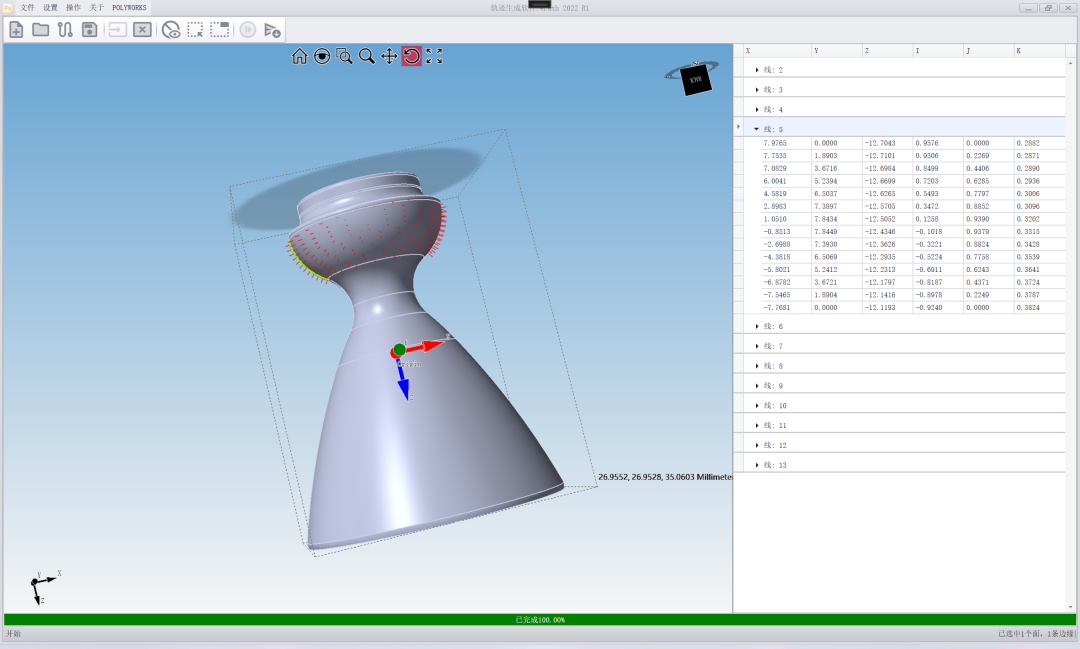
云知尚ePath-poly软件,实现了“等弧长间距测量点自动提取”功能。ePath-poly软件,轻松帮用户完成了如下工作内容:
1)按用户要求分布测量点:点云与数模最佳拟合后,可以根据测量间距要求或总测量点数要求,分布测量点,自动获取测量点偏差值。(等间距表示弧长等间距,解决了不同部位不同投影步长的问题)。
2)按设置的测量点生成偏差值:可以根据数模上标注的测量点位,对拟合后对应的点位进行测量,生成目标点偏差值。
3)输出设置的测量点的点云:可以实现测量点偏差值的点云导出,即将包含测量点位、目标点偏差值的数模导出成点云格式可供CATIA等软件查看。
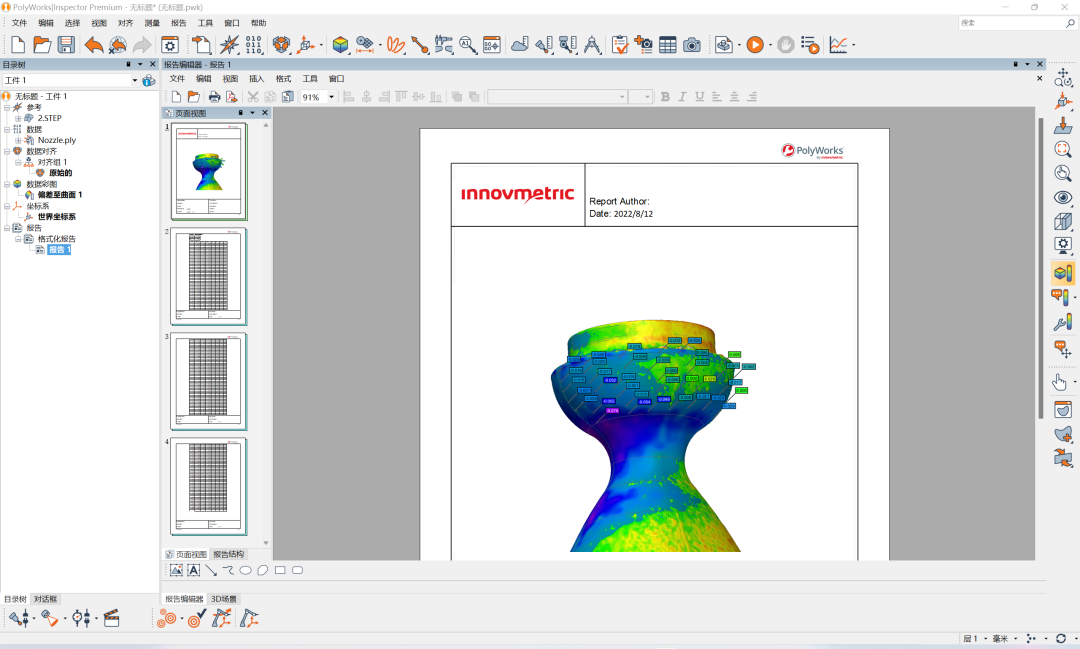
中航工业某客户的产品,需要对其尺寸进行精密的测量。客户关注测得的三角化模型上面,几乎每个位置,包含内外表面的偏差数据;同时,对于一些关键的配合面,客户想更进一步地,取得更多地点的偏差数据,并希望将这些数据输出成报表。云知尚ePath-poly软件交付给客户之后,这些问题全部迎刃而解。而且这部分繁重的规划工作,在几秒钟内就得到了解决,为客户节约了非常多的精力。
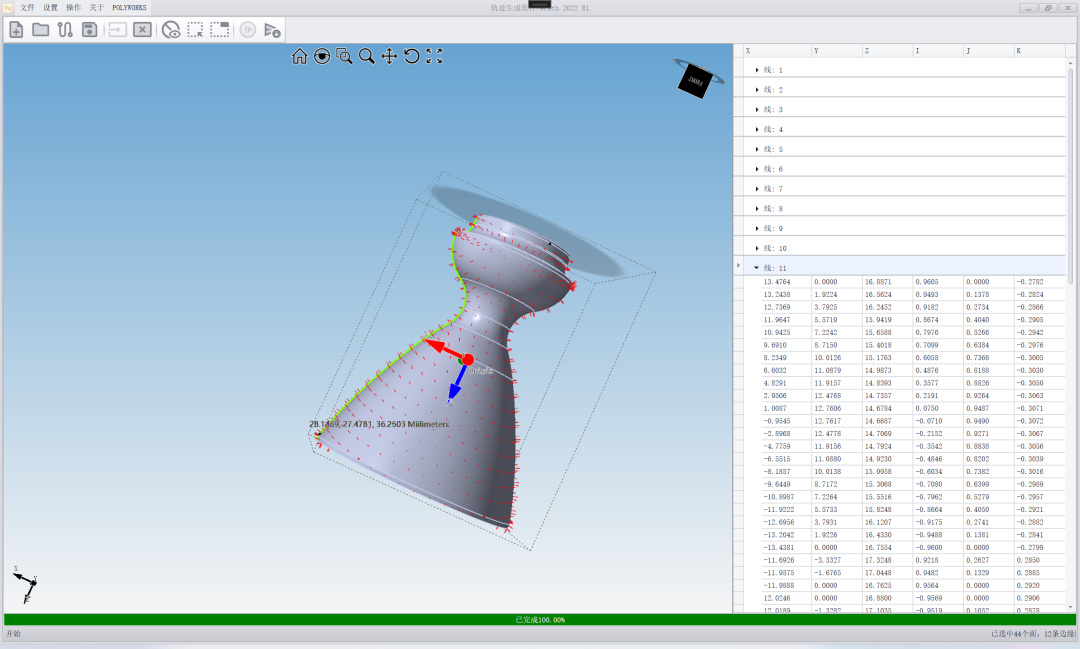
客户模型及自动规划的测量点
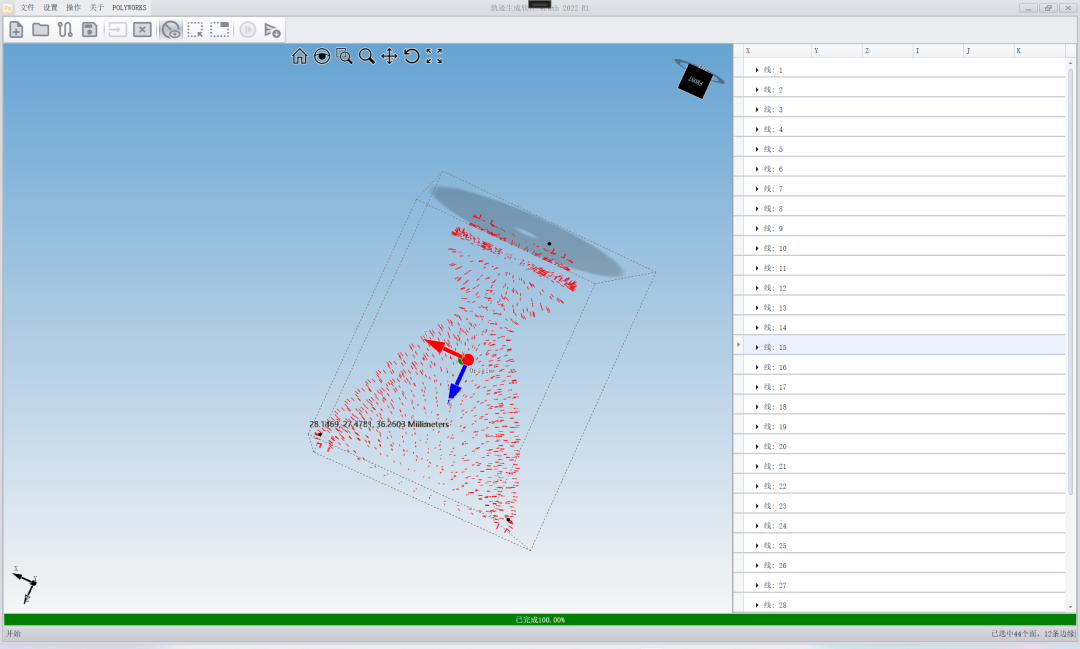
测量点显示
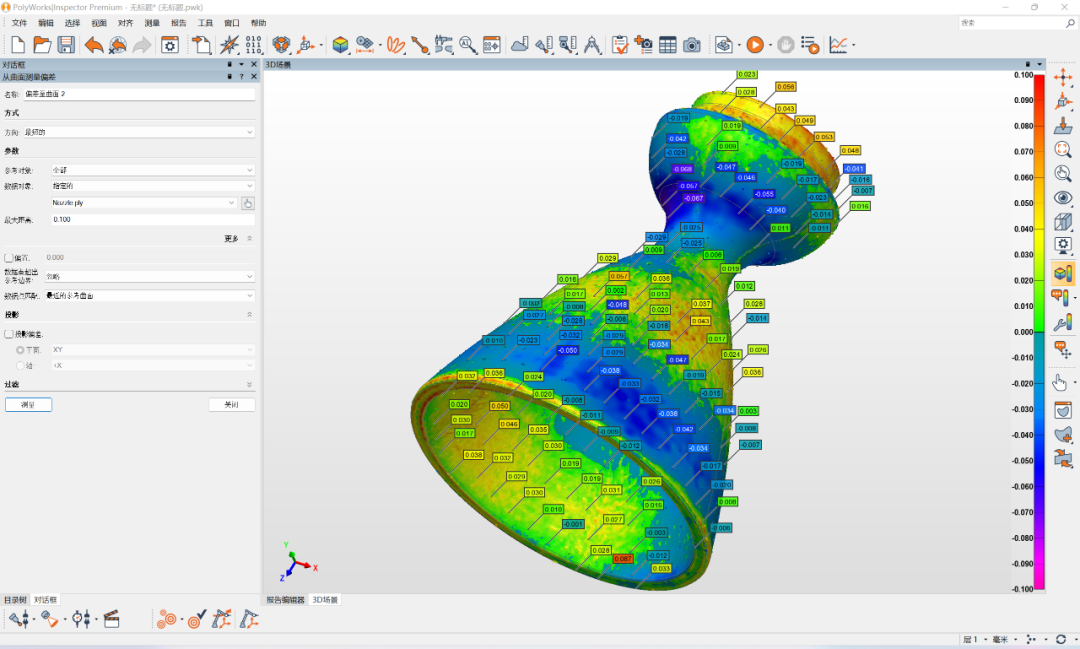
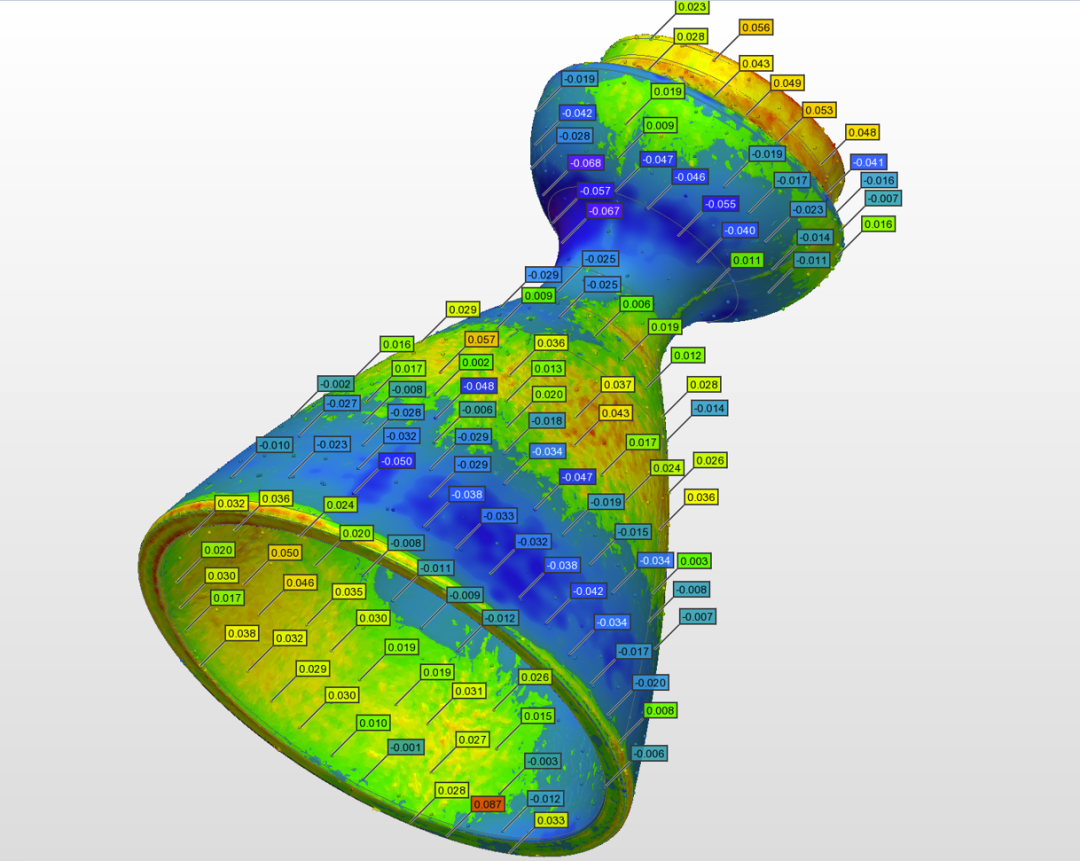
所有测量点的偏差值
测量点的偏差值-局部
对于局部特别关注的测量面,云知尚ePath-poly同样给出了有效的解决方案。
关键测量面点设置

关键测量面偏差数据
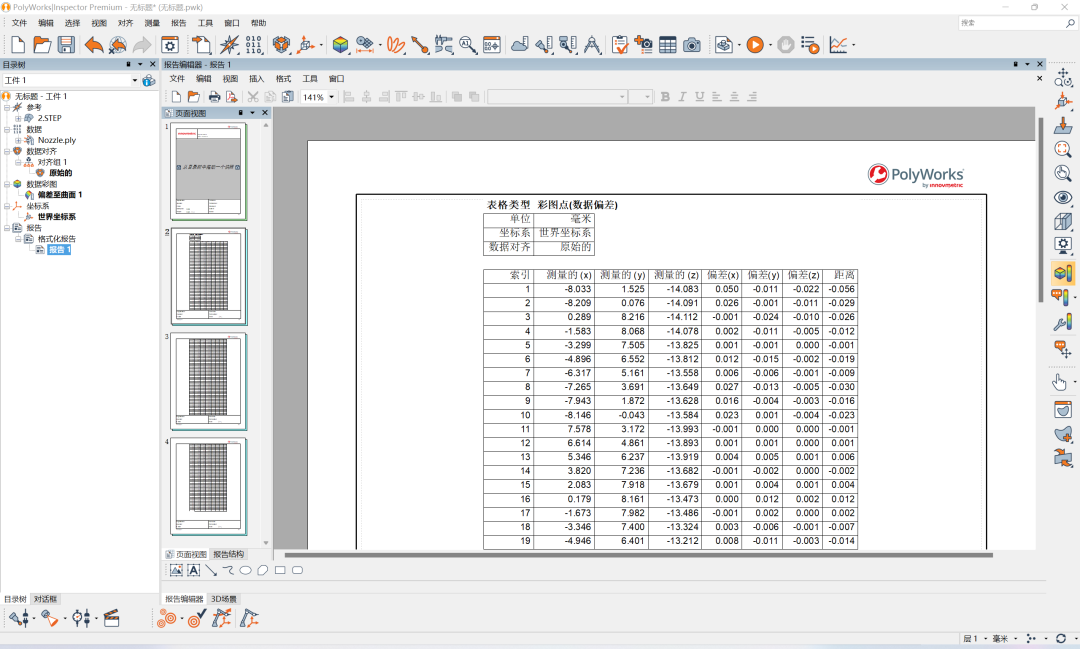
关键测量面数据报告
在本文中所演示的工件之外,云知尚为用户提供的多种工件进行了测试。通过对工件的测量点设置,客户关注的部分结构测量结果均能有效得到。客户对云知尚产品相当满意。
在本文中所涉及的项目中,客户提供了被测产品的CAD模型,所以比对的工作,在polyworks里面很容易就可以进行。在本项目交付之后,客户又对云知尚提出了一个更大的挑战:如果没有CAD模型,要进先进行逆向建模,再进行选点测量,该怎么办?
当然,在云知尚(西安)智能科技的诸位同事的努力下,这个问题,也已经得到了圆满的解决。相应的产品,即将面世,敬请期待!
 扫一扫,关注公众号
扫一扫,关注公众号
工作时间:周一至周五 9:00-18:00
联系人:李经理
手机:13119121219/13609159224
邮件:yunzhisun@yunzhisun.com
地址:西安市西咸新区空港新城临空产业园北区3号楼三层
