“几何误差”又称为运动误差,或者机构误差。坐标测量机由于机构的制造与装配的不完善,不可避免地,其运动部件沿着坐标系中的三条轴线运动时,实际位移会偏离它的名义值。我们从直线运动部件误差和回转运动误差两个方面来对几何误差,也就是俗称的“21项机构误差”进行讨论。
定位误差
当测量机的指令系统让某运动部件移动 x 时,运动部件的实际位移往往不恰好为x。测量机运动部件的实际位置与指令位置之差称为定位误差。三坐标测量机一般为全闭环系统,只有当标尺读数系统指示的值与指令值相符时,才停止运动,因此标尺误差是产生定位误差的主要原因。这里所谓标尺误差是指整个标尺读数系统的误差,即不仅包括标尺的刻划误差,也包括读数系统的误差,后者又包括电路与细分造成的误差。在实际三坐标测量机中,在多数情况下,测量线与标尺(基准线)不在同一直线上,即不符合阿贝原则。因此定位误差不仅包括标尺读数系统的误差,还包括阿贝误差。
在不同的位置测量时,由于阿贝臂不同,阿贝误差影响不同,测得的定位误差也不同。在任何位置测得的定位误差都包括标尺误差与阿贝误差。离标尺越远,阿贝误差影响越大。在实践中,可以选定某一与标尺平行的直线作为假想的标尺线(可称为等效标尺线)。将沿这条线测得的定位误差作为标尺误差。在习惯上,常选择与标尺较近的一条线作为等效标尺线。距离标尺越近,阿贝臂越短,越能较好地反映标尺误差,测得的数据也比较稳定。
标尺系统的误差主要是由于标尺刻划引起,是系统误差,由此引起的随机误差成本较小。但随着阿贝臂的加大,角运动中的随机分量影响加大,使测得的定位误差离散性会加大。

标尺系统
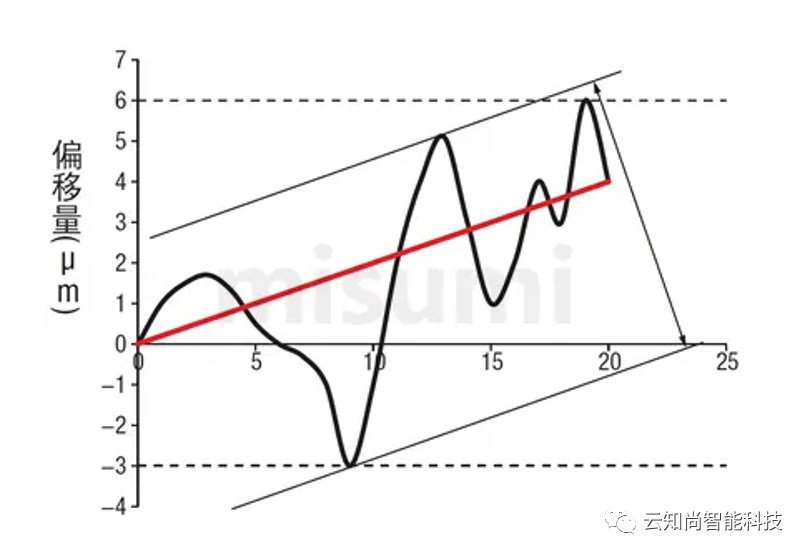
直线度运动误差
由于导轨系统的不完善,运动轴的实际运动轨迹可能偏离直线。这一误差称为直线度运动误差。它包含与运动方向正交的另外两个方向上的偏移。直线误差不同于导轨的直线度误差。它是由导轨系统综合作用而产生的。沿着不同的直线测量时,测得的直线度运动误差是不同的。 通常,直线度运动误差与定位误差沿同一条直线测量。
坐标测量机的各个运动部件直线度运动误差主要由导轨的加工误差引起,随位置而变化的系统误差占主要成分,导轨系统中摩擦变化、滚动体的位置变化、气浮导轨中气隙变化、油膜厚度变化等也会引起随机误差。
直线度运动误差
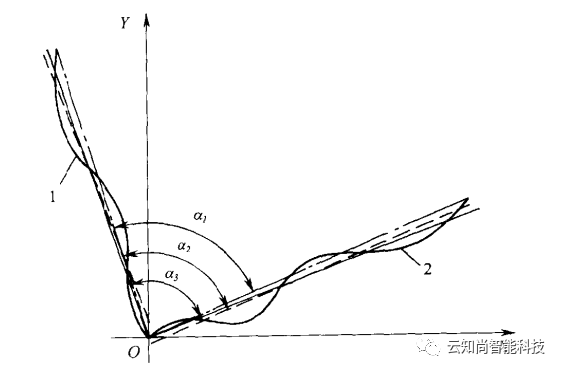
垂直度误差
三坐标测量机的三个测量轴,由于安装误差,3根轴线之间的夹角可能偏离它们的公称值90°,造成轴线间的垂直度误差。
垂直度误差是2个运动方向之间的误差。他们不是X,Y或者Z位移的函数。,它们是三个纯量误差。由于坐标测量机沿三轴的运动不是一条理想的直线,而带有直线度误差。轴线位置的定义方法不同,求得的垂直度误差也不同。运动轴线与直线度运动误差有 3 种定义方法:①首尾连线法,如图中点划线所示;②最小二乘法,如图中虚线所示;③通过原点的最小二乘法,也即过原点的平均线法,如图中实线所示。根据这3种方法求得的垂直度误差a,的值不同,分别为a1,a2和a3,相应的直线度运动误差也不同,但它们所表示的测量机运动误差是相同的。通常用第2与第3种方法较多,因为它们受单点误差的影响较小,所测得的垂直度误差值比较稳定。应当说第2种方法受单点误差值影响最小,但这时原点直线度运动误差不为零,不好理解。
垂直度误差主要由导轨安装、调整与加工误差引起。一旦安装调整完毕,它应该是一个定值误差,它的主要部分是系统误差。
垂直度误差
 扫一扫,关注公众号
扫一扫,关注公众号
工作时间:周一至周五 9:00-18:00
联系人:李经理
手机:13119121219/13609159224
邮件:yunzhisun@yunzhisun.com
地址:西安市西咸新区空港新城临空产业园北区3号楼三层
